
An up-to-date look at free software and its makers
Projects on the Move

© Kirill Zdorov, Fotolia
Python inventor Guido van Rossum is known to have a good sense of humor and probably had a good laugh when he heard about the Guido van Robot project. If you are learning how to program, or would like to teach others, this software gives you a light-hearted introduction.
Perhaps you've heard of Python creator Guido van Rossum, but you might not be familiar with Karel the Robot. Almost 30 years ago, Richard Pattis invented a robot called Karel and presented him to the general public in his 1981 book Karel the Robot: A Gentle Introduction for the Art of Programming [1]. This virtual character has the advantage of living in a simple world in which his biggest challenges are maneuvering around obstacles – namely, walls – and picking up beepers. To tackle his tasks, Karel can be programmed in a simple language with an understandable instruction set and without variables.
The original Karel the Robot programming language was based on Pascal, but many variants have been invented since then to give learners a simpler approach to other programming languages. One of these variants is Guido van Robot, a character in the long-standing tradition of simulated, programmable robots, whose task it is to introduce newcomers to Python [2] (Figure 1). As a tribute to Python's Dutch inventor, Guido van Rossum [3], the students who programmed the Python teaching language in 2001 called it Guido van Robot [4]. Version 3.3 is now available.
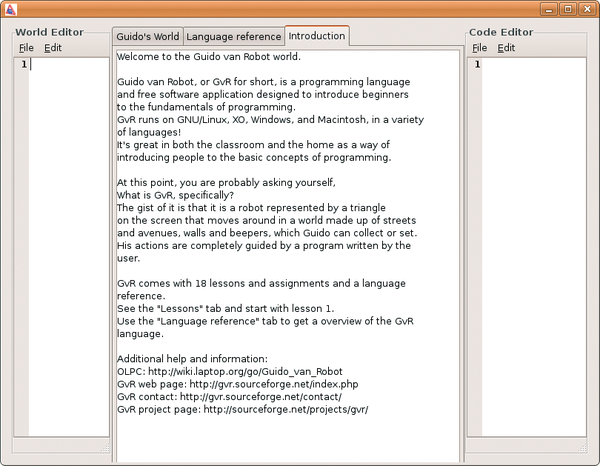 Figure 1: Guido van Robot makes the world of programming more easily accessible by providing an interface and a language of its own, based on Python.
Figure 1: Guido van Robot makes the world of programming more easily accessible by providing an interface and a language of its own, based on Python.
Guido – the robot that is, not the Python inventor – can understand five commands: move, turnleft, pickbeeper, putbeeper, and turnoff. The first two commands tell the robot to move or turn left; pick and put tell it to pick up and drop beepers, and turnoff quits the program (Figure 2).
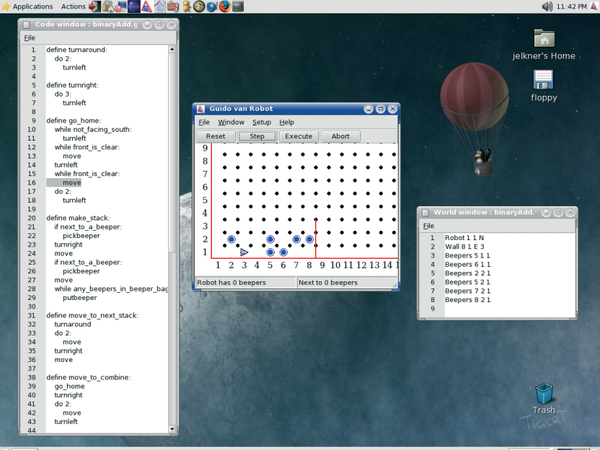 Figure 2: The Guido van Robot programming language running on Linux. The robot understands five commands: move, turnleft, pickbeeper, putbeeper, and turnoff.
Figure 2: The Guido van Robot programming language running on Linux. The robot understands five commands: move, turnleft, pickbeeper, putbeeper, and turnoff.
Besides the imperatives listed here, Guido – like most other programming languages – gives users loops and conditions. The latter are introduced by the key words if, elif, and else; the while key word supports conditional execution. The do X command tells Guido to repeat the following command block a certain number of times.
View of the World
To be able to react to its environment, Guido van Robot uses 18 test instructions to explore its world, including front_is_clear, left_is_clear, right_is_clear, and front_is_blocked, that define the existence of walls. The objects lying around on the playing field are referred to as beepers. The instructions next_to_a_beeper and any_beepers_in_beeper_bag and corresponding negatives tell Guido where the beepers are.
The last remaining test category contains the facing_north and not_facing_north commands and variants, which use the other three directions instead of north. Typical Guido van Robot instructions look like:
if next_to_a_beeper: pickbeeper elif front_is_clear : move
What makes Guido van Robot so attractive to newcomers is that the environment has its own interface, comprising the Code Editor, World Editor, and Guido's World area. Python newcomers can watch their robot tour the world while their program is running.
Define-It-Yourself
If you are not happy with the existing instruction set, you can define your own instructions based on it. Put the define Name keyword at the start of a definition block, which can contain simple instructions, loops, and conditions. Here's an example for a step backward:
define back: do 2: turnleft move do 2: turnleft
What Guido van Robot now lacks is an environment through which the program can guide him.
Fortunately, the software package includes three worlds: boring, escape1, and maze1. The first lacks barriers, which is a good thing in normal circumstances, but here, its lack of events makes it unsuitable for testing algorithms. escape1 is a more interesting prospect; a world that comprises a room with an exit. Trying to get to the exit as quickly as possible is a more useful programming task.
The third environment is a small maze, as you might have guessed from the name, maze1, in which Guido finds the first beeper.
If you want to set your robot on more ambitious tasks, you easily can define your own worlds. For this, the World Editor understands the WALL command.
In a similar way, you can use the Robot keyword to set the starting position for Guido van Robot. To feed the robot in your world, you need to use the Beepers keyword to lay a trail of numbered beepers.
The first two arguments define the position of the object and are followed by an arbitrary number that the program uses to label the beeper.
After designing a world and writing a robot program, you can press the Execute button to launch the robot. The code editor highlights the current line, making it easy to follow loops and conditions. If everything is happening too fast for you to follow, you can press the Step button to step through the instructions one by one.
If you are familiar with Python or any other programming language, you will easily master programming Guido van Robot and its numerous relatives. Programming the robot can be fun even for serious programmers. The effortless way in which you can maneuver the robot through small worlds is a rewarding experience.
Of course, Guido van Robot is suitable for teaching, which is what the project is really about (Figure 2). If you never have tried programming, this gives you a fun approach to the buzz language Python and could be your ticket to entering the wacky world of coding.
Infos
- Karel the Robot: http://www.mtsu.edu/~untch/karel/book.html
- Python: http://www.python.org
- Guido van Rossum: http://www.python.org/~guido
- Guido van Robot: http://gvr.sourceforge.net
Buy this article as PDF
(incl. VAT)
Buy Linux Magazine
US / Canada
UK / Australia
Subscribe to our Linux Newsletters
Find Linux and Open Source Jobs
Subscribe to our ADMIN Newsletters
Support Our Work
Linux Magazine content is made possible with support from readers like you. Please consider contributing when you’ve found an article to be beneficial.

News
-
Canonical Releases Ubuntu 24.04
After a brief pause because of the XZ vulnerability, Ubuntu 24.04 is now available for install.
-
Linux Servers Targeted by Akira Ransomware
A group of bad actors who have already extorted $42 million have their sights set on the Linux platform.
-
TUXEDO Computers Unveils Linux Laptop Featuring AMD Ryzen CPU
This latest release is the first laptop to include the new CPU from Ryzen and Linux preinstalled.
-
XZ Gets the All-Clear
The back door xz vulnerability has been officially reverted for Fedora 40 and versions 38 and 39 were never affected.
-
Canonical Collaborates with Qualcomm on New Venture
This new joint effort is geared toward bringing Ubuntu and Ubuntu Core to Qualcomm-powered devices.
-
Kodi 21.0 Open-Source Entertainment Hub Released
After a year of development, the award-winning Kodi cross-platform, media center software is now available with many new additions and improvements.
-
Linux Usage Increases in Two Key Areas
If market share is your thing, you'll be happy to know that Linux is on the rise in two areas that, if they keep climbing, could have serious meaning for Linux's future.
-
Vulnerability Discovered in xz Libraries
An urgent alert for Fedora 40 has been posted and users should pay attention.
-
Canonical Bumps LTS Support to 12 years
If you're worried that your Ubuntu LTS release won't be supported long enough to last, Canonical has a surprise for you in the form of 12 years of security coverage.
-
Fedora 40 Beta Released Soon
With the official release of Fedora 40 coming in April, it's almost time to download the beta and see what's new.