
Control your Rasp Pi projects with Python’s Tkinter library
The Tinkerer

© Lead Image © agor2012, 123RF.com
Use Tkinter to control your Rasp Pi projects from a smartphone or tablet.
If you are looking for an easy way to control your Raspberry Pi projects, consider Python's Tkinter library. In about 20 lines of Python code, you can create a graphic program to control a Rasp Pi rover project (Figure 1). This article shows how to create a Python Tkinter application to control the Rasp Pi's General Purpose Input Output (GPIO) pins. I will also show you how to set up a desktop shortcut that you can use to easily launch the application, and I will configure a Virtual Network Computing (VNC) server so that a smartphone, tablet, or PC can control the Rasp Pi remotely.
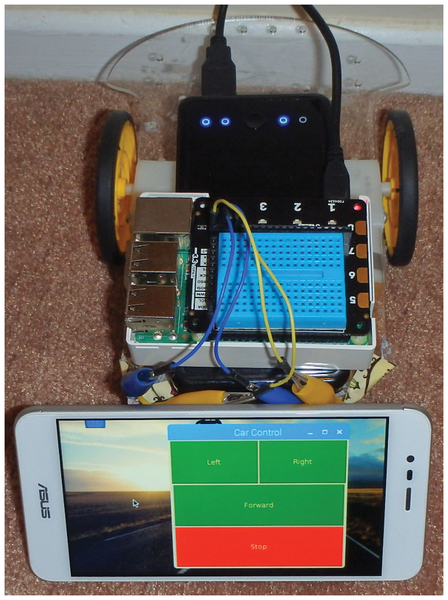 Figure 1: Tkinter-controlled rover.
Figure 1: Tkinter-controlled rover.
Python Tkinter Library
Tkinter [1] is bundled with the standard Rasp Pi Python installation. The base Tkinter library contains 17 different widgets that you can use for graphic applications. These widgets can be defined with customizable colors, sizes, text, and commands. There are three geometry managers (Pack, Grid, and Place) that can be used to arrange the widgets. For Rasp Pi hardware projects, I found the Grid geometry manager was a good fit. Listing 1 is a simple test program that presents two buttons in a grid and prints feedback when the buttons are pressed. (Note: Python 2.7 references the library as Tkinter, whereas Python 3 uses tkinter, lowercase). Figure 2 shows this test program with some button feedback.
[...]
Buy this article as PDF
(incl. VAT)
Buy Linux Magazine
Subscribe to our Linux Newsletters
Find Linux and Open Source Jobs
Subscribe to our ADMIN Newsletters
Support Our Work
Linux Magazine content is made possible with support from readers like you. Please consider contributing when you’ve found an article to be beneficial.

News
-
Substantial Update to IPFire Now Available
The lastest version of IPFire features a fundamental change to how the system handles DNS.
-
Gnome Working on Test Center App to Make Testing Easier
It's now possible to test experimental features on the Gnome desktop without worrying that you'll break things.
-
New Vulnerability Discovered in Linux Kernel
Hiding out for nearly 15 years, the Ghostlock vulnerability allows a standard logged-in user to gain root privileges.
-
New Linux Flaw Lets Attackers Escape VMs
A 16-year-old vulnerability allows an attacker to escape a virtual machine, gain access to the host, and execute malicious code.
-
Hannah Montana Linux Is Back!
Developer Noah Cagle decided the world needed the once obscure but beloved Linux distribution and gave it a decidedly pink refresh.
-
System76 Refreshes the Lemur Laptop
If you're looking for a laptop with tons of power and battery, look no further than the latest iteration of the System76 Lemur Pro.
-
More than 43 Million Lines of Code in Linux Kernel 7.2
Using the cloc utility, Michael Larabel of Phoronix discovered that Linux kernel 7.2 has over 43 million lines of code.
-
Kubuntu Focus Goes Ultra
The Kubuntu Focus team has upped the performance ante of its M2 and Zr laptops with the latest, greatest CPUs from Intel.
-
Linux Gamers May Soon See Less Mouse Lag in KDE Plasma
Gamers using KDE’s Plasma desktop have been suffering from a slight input delay in mouse movement that could lead to getting fragged.
-
Three Lines of Code Improve Linux Storage Performance
A developer changed three lines of code, giving Linux storage performance a 5% bump.